KRXG12C矿用轨道式巷道巡检机器人
KRXG12C矿用轨道式巷道巡检机器人
系统介绍
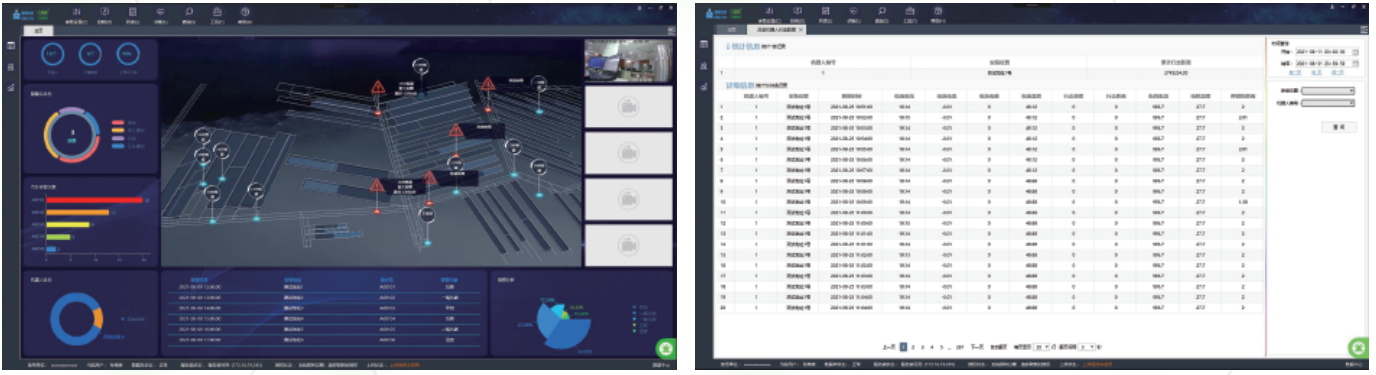
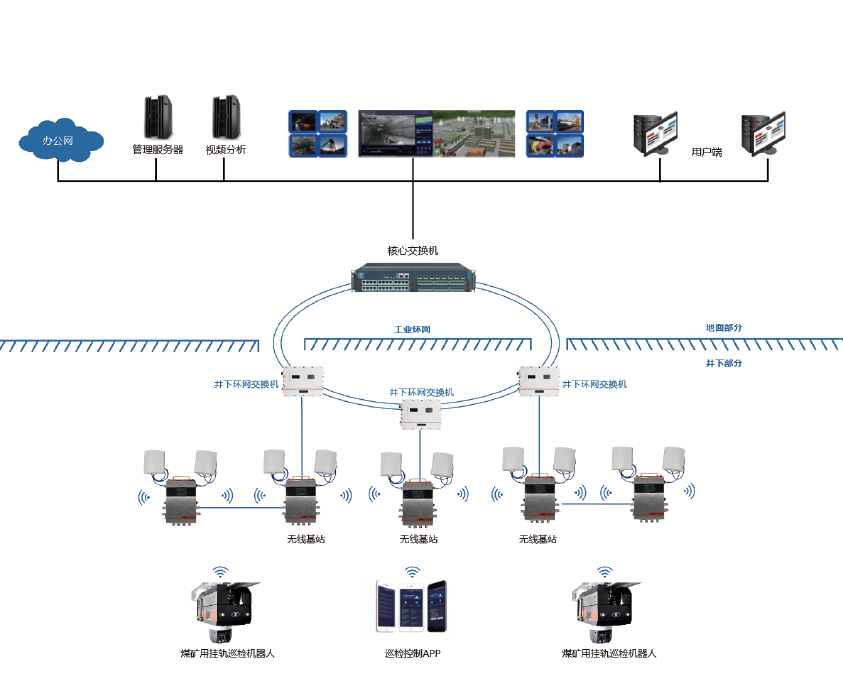
煤矿用轨道式葚道巡检机器人主要由KRXG12C巡检机器人、基站、轨道系统、充电系统、地面工作站和手机客户端组成。机器人本体吊挂在轨道上在巡检巷道内进行往复运行,借助机器人搭载的多种气体传感器、可见光和热成像探头,从声、光、热、气、烟等方面全方位监控井下环境安全和设备运转情况,能够完全替代巡检工可靠巡检,同时所有采集数据通过无线基站网络传输到监控中心,达到远程监控的目的。适用于煤矿变电所、绞车房、泵站、工作面及其它井下重点巡检区域。
系统技术参数
1)适用领域:l类防爆;
2)防护等级:IP67;
3)行走速度:0-0.4m/s速度可调;
4)可见光摄像仪:25倍光学变焦,400万像素:
5)红外热成像仪测温范围:-20°C~150℃C;
6)云台参数:水平0~350°,垂直-90°~90°;
7)指向测温:红外线;
8)环境检测参数:激光甲烷、一氧化碳、氧气、烟雾;
9)爬坡角度:≤20°;
10)运行里程:充满电,水平巷道连续运行4Km(实际运行里程受现场工况影响);
11)照明:白光辅助照明;
12)定位巡航:支持;
13)定时自动巡航:支持;
14)后台无人值守模式:支持;
15)手机APP及Web显示及控制:支持;
16)图像AI识别:支持;
17)声音检测:支持;
>>自动充电
机器人具备自动充电技术,电量低时可自行寻找充电站,自主充电;
>>自动巡检
•机器人具备多任务自主定时、定点巡检功能;
•机器人无论在行走还是在停止时,都实时上传位置信息到地面站,工作人员能很直观看到机器人在井下的位置。同时机器人会根据当前剩余电量计算出行走距离,判断出是否能走完剩余的巡检路线,自主选择暂停人物返航充电的时间;
>>自主避障
机器人避障系统能够感知障碍物停止并报警,当障碍物消失后可继续完成巡检任务,具备灵敏度高、响应快的特点;

>>环境监测
本机器人集成了烟雾、甲烷、一氧化碳、氧气和温度检测传感器,可以实时对井下巡检环境进行持续监测, 及时预防井下瓦斯和火灾等事故;
>>双向对讲
机器人语音对讲系统,可通过高增益拾音器和高分贝扬声器实现就地人员和操作平台的双向语音对讲,也可 单向实现平台对现场喊话和录音;
>>就地控制
机器人支持智能手机APP就地控制及信息查看;
>>AI图像识别分析
·机器人自身移动摄像仪可实现:烟火报警、人员越界、人员闯入、行为分析、电机温度异常,安全 帽等识别; ·机器人自身移动摄像仪配合地面后端超脑可实现:仪器仪表指针识别、滴漏识别、睡岗检测、玩手 机检测等; ·机器人系统配合增加固定值守摄像仪可实现:皮带跑偏、堆煤、异物识别(大块、锚杆等)、空岗 检测、智能煤流等;
>>导航定位功能
机器人采用高精度编码器+校准定位方式,可以使机器人定位报警更加精准;
>>Wi-Fi/5G/4G通讯可选
机器人支持Wi-Fi/ 5G/4G通讯选择;
>>系统联动
机器人可联动矿山安全监控系统,实现报警或启动现场巡检查看,监控数据可回传至系统。